
نتایج بیشتر...
آموزش جامع Simulink




توضیحات
سیمیولینک یک ابزار شبیهسازی همراه با نرمافزار MATLAB است. موارد استفاده از سیمیولینک عمومی هستند و مانند بسیاری دیگر از نرمافزارهای شبیهسازی مهندسی، منحصر به کاربردهای خاصی نیست.
با استفاده از سیمولینک میتوان رفتار یک سیستم را بدون نیاز به ساختن آن تحلیل نمود. در نتیجه یک مهندس با استفاده از سیمولینک میتواند علاوه بر صرفهجویی در هزینه و زمان به بررسی تاثیر اغتشاشات یا سایر عوامل ورودی بر عملکرد یک سیستم بپردازد. همچنین شبیهسازی سیستمها این توانایی را در اختیار میگذارد تا عکسالعمل یک سیستم در صورت تغییر پارامترهای ورودی آن به خوبی شناخته شود. سیمولینک به صورت یک کتابخانه در نرمافزار MATLAB عرضه شده است که شبیهسازی توسط بلوکهای این کتابخانه به صورت دیاگرامهای بلوکی انجام میشود.
سرفصل های آموزشی این مجموعه از سری نرم افزارهای آموزشی پارسیان عبارتند از:
فصل اول: مقدمه
فصل دوم : کتابخانه Math Operations
فصل سوم : کتابخانه Sources
فصل چهارم : کتابخانه های Continuous و Discrete
فصل پنجم : کتابخانه ی سیگنال های گسسته
فصل ششم : جداول مراجعه
فصل هفتم : کتابخانه Discontinuities
فصل هشتم: کتابخانه عملیات منطقی و بیتی Logic and Bit Operations
فصل نهم: کتابخانه بررسی مدل Model Verification
فصل دهم : پورتها و زیرسیستم ها
فصل یازدهم : کتابخانه Signal Routing
فصل دوازدهم : کتابخانه خواص سیگنال
فصل سیزدهم: کتاب خانه بلوک های قابل تعریف توسط کاربر و خطایاب سیمولینک
از سایر
محصولات آموزشی نرم افزارهای تخصصی
دیدن فرمایید.
محصولات مشابه
آموزش جامع نرم افزار SPSS
آموزش جامع نرم افزار Archicad
آموزش جامع نرم افزار ETABS
آموزش جامع نرم افزار Land desktop
آموزش جامع نرم افزار SAFE
آموزش نرم افزار SAP2000
آموزش مدل سازی و مونتاژ قطعات با Solidworks
آموزش ایجاد سطوح پیچیده با Solidworks
آموزش جامع نرم افزار Minitab
آموزش جامع نرم افزار Matlab
آموزش جامع نرم افزار Primavera 6
آموزش جامع نرم افزار Primavera P3
آموزش طراحی سطوح پیچیده با CATIA
آموزش ورق کاری و جوشکاری با CATIA
آموزش طراحی و مدل سازی قطعات با CATIA
آموزش جامع نرم افزار Pro Engineer
آموزش جامع نرم افزار AutoCAD
آموزش جامع Simulink
Simulink یکی از ابزارهای MATLAB برای مدلسازی، شبیهسازی، و تحلیل سیستمهای دینامیکی است. این آموزش، گامبهگام شما را با اصول و کاربردهای Simulink آشنا میکند.
۱. مقدمه و آشنایی با Simulink
۱.۱. Simulink چیست؟
-
Simulink یک محیط گرافیکی است که امکان مدلسازی مبتنی بر بلوک، شبیهسازی و تحلیل سیستمهای خطی و غیرخطی را فراهم میکند.
-
برای سیستمهای کنترل، پردازش سیگنال، سیستمهای مکانیکی و الکترونیکی استفاده میشود.
۱.۲. ویژگیهای Simulink:
-
طراحی گرافیکی با کشیدن و اتصال بلوکها.
-
امکان ارتباط مستقیم با MATLAB.
-
شبیهسازی سیستمهای پیوسته و گسسته.
-
ابزارهای پیشرفته برای طراحی کنترل و بهینهسازی.
۲. شروع کار با Simulink
۲.۱. باز کردن Simulink:
-
در محیط MATLAB، دستور
simulinkرا وارد کنید. -
پنجره Simulink Start Page باز میشود.
۲.۲. ایجاد مدل جدید:
-
در Start Page روی Blank Model کلیک کنید.
-
مدل خالی در محیط Model Canvas باز میشود.
۲.۳. ذخیره مدل:
-
فایل مدل را با پسوند
.slxذخیره کنید.
۳. ساختار محیط Simulink
۳.۱. اجزای اصلی:
-
Library Browser: دسترسی به بلوکهای آماده.
-
Model Canvas: فضای کاری برای طراحی مدل.
-
Simulation Toolbar: ابزارهای شبیهسازی.
-
Scope Windows: مشاهده نتایج شبیهسازی.
۳.۲. آشنایی با بلوکها:
-
بلوکهای اصلی:
-
Sources: تولید سیگنال (مانند Step و Sine Wave).
-
Sinks: نمایش یا ذخیره خروجی (مانند Scope).
-
Math Operations: عملیات ریاضی.
-
Continuous: سیستمهای پیوسته.
-
Discrete: سیستمهای گسسته.
-
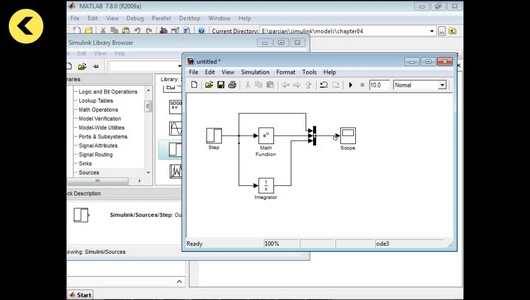
۴. ایجاد مدل ساده
۴.۱. افزودن بلوکها:
-
از Library Browser بلوک Step و Scope را انتخاب کنید.
-
بلوکها را به محیط مدل بکشید.
۴.۲. اتصال بلوکها:
-
با کشیدن یک خط از خروجی بلوک Step به ورودی بلوک Scope، اتصال ایجاد کنید.
۴.۳. اجرای شبیهسازی:
-
از منوی Simulation > Run استفاده کنید.
-
در بلوک Scope پاسخ Step را مشاهده کنید.
۵. شبیهسازی سیستمهای دینامیکی
۵.۱. سیستمهای خطی:
-
استفاده از بلوک Transfer Function برای تعریف تابع تبدیل.
H(s) = (numerator)/(denominator)
-
اتصال ورودی Step به تابع تبدیل و خروجی به Scope.
۵.۲. سیستمهای غیرخطی:
-
بلوکهای Saturation و Lookup Table برای شبیهسازی رفتار غیرخطی.
۵.۳. سیستمهای گسسته:
-
استفاده از بلوکهای Discrete-Time Integrator یا Zero-Order Hold.
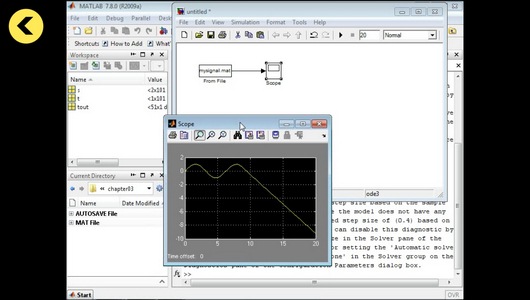
۶. تحلیل و مشاهده نتایج
۶.۱. مشاهده نتایج در Scope:
-
دادهها و خروجیها در Scope نمایش داده میشوند.
-
ابزارهای زوم و تحلیل در Scope قابل دسترس هستند.
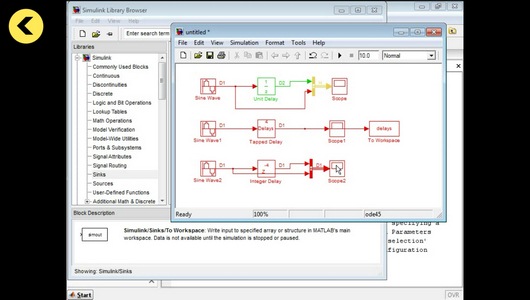
۶.۲. ذخیره دادهها:
-
استفاده از بلوک To Workspace برای ارسال دادهها به MATLAB.
۶.۳. تحلیل در MATLAB:
-
دستورات MATLAB برای تحلیل دادههای شبیهسازی:
plot(out.simout.time, out.simout.signals.values);
۷. طراحی کنترلکنندهها
۷.۱. کنترل PID:
-
استفاده از بلوک PID Controller برای طراحی کنترلکننده.
-
اتصال کنترلکننده به سیستم و تنظیم پارامترهای P، I، D.
۷.۲. حلقه بسته:
-
طراحی یک سیستم با فیدبک:
-
اتصال خروجی سیستم به ورودی کنترلکننده.
-
استفاده از بلوک Sum برای اعمال سیگنال خطا.
-
۸. ابزارهای پیشرفته Simulink
۸.۱. Subsystem:
-
گروهبندی بلوکها در یک Subsystem:
-
انتخاب بلوکها.
-
کلیک راست و انتخاب Create Subsystem.
-
۸.۲. استفاده از Stateflow:
-
مدلسازی رفتارهای منطقی و شرطی.
-
تعریف حالتها و انتقالها برای سیستم.
۸.۳. MATLAB Function:
-
استفاده از بلوک MATLAB Function برای تعریف توابع دلخواه:
function y = myFunction(x)
y = x^2;
end
۹. تنظیمات شبیهسازی
۹.۱. انتخاب حلکننده:
-
تنظیمات در Model Configuration Parameters:
-
Solver: انتخاب روش حل (PDE، ODE45، Fixed-Step).
-
Start Time و Stop Time: تنظیم زمان شبیهسازی.
-
۹.۲. بهینهسازی عملکرد:
-
کاهش گام زمانی برای دقت بیشتر.
-
استفاده از روشهای گسسته برای سرعت بیشتر.

